Science and Mechatronics Aided Research for Teachers with an Entrepreneurship Experience (SMARTER)
2014: Week II
Yancey Quinones
The morning began with David Arnstein bringing in a box of donuts for everyone. This was very nice of him given that he was on time and not late. Thank you, David!
Jared began the day’s lectures on the topic of motors. He covered various methods of motor speed control, focusing mostly on pulse width modulation (PWM). Next, for motor direction control he discussed half bridges and H-bridges and finally moved on to servo motors and stepper motors. We then went into the lab to apply what we had learned to the control of servos. In the morning session, we worked mostly on controlling a standard servo by writing code that would control the servo’s angle via PWM.
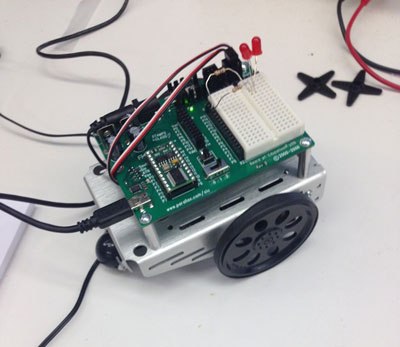
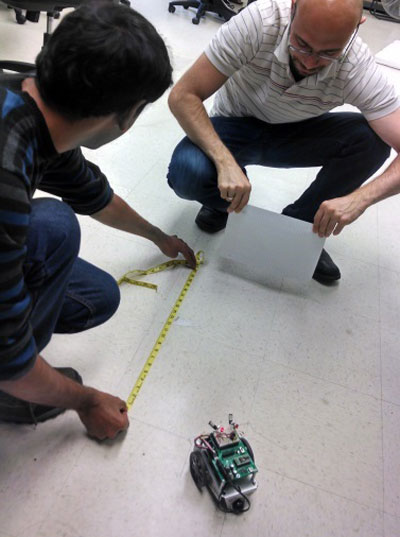
After lunch, Jared covered robotics and a brief history of the original conception of robots in literature along with the rather impressive developments that are going on now in the field. The lecture was brief and we went into the lab to work on controlling continuous servos since those would drive the wheels of our first robot, the BOE Bot. The group was able to successfully build the robots and drive them as per the instructions in the BOE Bot robot kit. Some started experimenting on our own with making the robot do different things. Prasad and I began programming it to move in a square. We were able to make the robot make three left turns, bringing it near its starting point; however, the pattern was far from a perfect square. Our challenge now is to figure out how to make it turn at right angles more precisely.
Sarah Wigodsky
Professor Kapila shared with us an article he recently read on science teaching, after teachers met with President Obama to share their experiences and opinions. We discussed the importance of teachers having research experiences so that we can better teach our students. Discussing educational philosophy emphasized the importance and value of this program. Even though up until now we have not spent time explicitly discussing how science should be taught or what specifically should be taught, this program is influencing our approach to both.
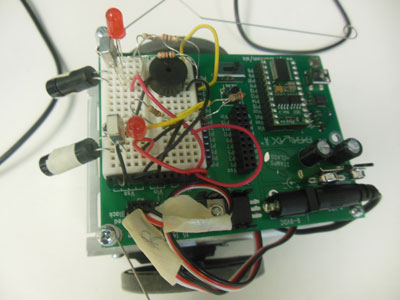
In the morning, Jared taught us about two types of sensors that we would be using on our robots. We learned about infrared sensors that we would add to our Boe-Bots to determine the distance to obstacles. We learned how to connect the infrared detector in a circuit and how to write code for it. Jared then introduced a tactile sensor called a whisker. It cleverly acts as a switch because when the long metal whisker encounters an object, it gets pushed backward into a short piece of metal that sticks out from the breadboard to complete the circuit.
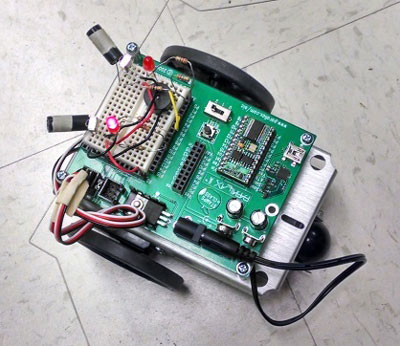
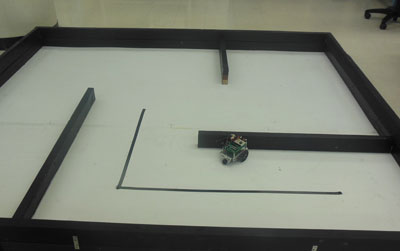
After the lecture, we headed to the lab to add these sensors to our robots. We started by adding two infrared LEDs and two infrared detectors to our Boe-Bot so that it looked that like it had eyes. After testing to make sure the infrared detectors were working properly, we wrote a program that made our Boe-Bot turn to avoid obstacles. We then had the robot move so that it would stay within the lines of a black rectangle. We had a bit of trouble with this since at first it moved over the lines without changing course. But after adjusting the direction the infrared LEDs and sensors were pointing and making the black lines of the rectangle thicker, our robot stayed inside the rectangle nicely.
In the afternoon, Jared taught us about relays. There are mechanical relays, reed relays and solid state relays. Mechanical relays can handle more power than other relays but have a relatively slow switching speed. Reed relays are smaller and can do faster switching. Solid state relays can be used to switch on an object connected to a 120 V outlet.
When we came back to the lab, we had a new example of a feedback system. An air conditioning unit was being installed. Hooray!
In the afternoon we added whiskers to our Boe-Bot and made it alter its course when it encountered obstacles. We then rebuilt our robot with the infrared LEDs and infrared sensors. At the end of the day we were trying to get it to follow a line, but we got stuck. At first, it went backwards instead of forwards. Now it can follow a black line and turn left around corners, but it won’t turn right. We’ll have to fix it tomorrow.
Louis Morgan
The morning started with a lecture, by Jared Alan, on RC passive filters. He discussed the low-pass and the high-pass filters. A fascinating discussion on differential equations and Laplace transforms ensued! A graphical interpretation (Bode plot) of the low-pass filter can provide invaluable feedback during systems design. The afternoon lecture was about op-amps, which are found in active filters. An op-amp contains a number of active elements such as amplifiers and transistors in their design.
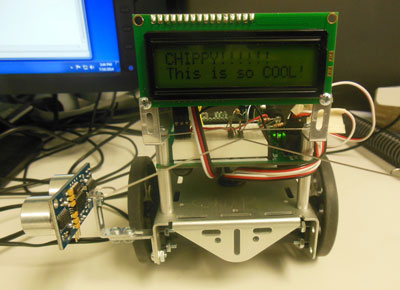
In the research lab we continued to work on the Boe-Bot. We were able to complete the activities in the Boe-Bot robotics textbook, which included phototransistors and infrared headlights in the designs. In addition some teams were able work on additional projects, such as using the ultrasonic distance sensor on their Boe-Bots!
The Boe-Bots was certainly one of the highlights of the course so far! However today was the end of the Boe-Bots programming and design. Tomorrow we will be learning business venturing. Here are some comments from teachers on their highlights of the program so far:
- Building and testing Boe-Bots e.g., simple binary light sensor and navigating with infrared headlights was very interesting! These designs have many applications in biological systems such as light intensity photosynthesis or animal behavior (response)!
~ Louis - Object detection and avoidance was interesting. When no object was detected the output was high when it detected something, the output was low and it pulled back.
~ Angeleke - Programming our robot with whiskers and also with IR detectors and LED’s. The latter was challenging and at times frustrating – three of us tried building the circuit and we used a different board of education – but it was nonetheless absolutely fascinating.
~ Prasad - I have enjoyed coming up with our own projects for the Boe-Bots and programming it to accomplish a task.
~ Sarah - The most fascinating part of the program thus far was creating our own program to use 2 different sensors to navigate the bot’s way around the maze! We felt so accomplished!!!
~ Lisa - I’ve loved learning about the different components frequently used in electronics (transistors, op-amps, relays). I understand how things work much more deeply and can’t wait to share this with my students!
~ Mike - The hands-on experience of conducting pilot tests on the components of the apparatus for our research project has been exciting. We were able to apply codes from the experiments and theories to enable the components to work. We have also found that the apparatus can be constructed from bio-inspiration of multiple species of animals.
~ Dr. Walcott
Lee Hollman
An exciting day for everyone as we embarked on the entrepreneurship part of the SMARTER program! We began the day with a lecture from Professor Oded Nov, who defined entrepreneurship as managing and accepting the risk of starting a new business. As the lecture progressed, it became rapidly clear that having a good idea alone isn't sufficient. We would have to take on the challenge of determining if there's an existing marketplace for a given product, what our competition might be in a given business sector, and even personal decisions such as how comfortable we are with assuming the risk that accompanies any new endeavor.
Professor Nov placed particular emphasis on Porter's Five Forces, which define the challenges facing even the most stalwart of start-ups. Porter's Five Forces include the degree of existing rivalry in a given field, the threat of potential new entrants in said field, the bargaining power of the suppliers who equip a company with the materials that it requires, the bargaining power of the buyers who purchase the products, and the threat of substitutes for a given product that could negatively impact sales.
Every one of us had the chance to contemplate Porter's Five Forces in great detail during a "working lunch" in which we divided into teams and drafted a hypothetical business plan for our own start-up ventures. At the end of the day, each team had the opportunity to deliver a five-minute pitch. After each pitch, we then made inquiries about each others' business plans to discuss their viability in greater detail. Our next step will be to further improve upon the work we've begun, with the goal of fully realizing our own entrepreneurial visions.
Lisa Ali
We started off our morning with a visit to the Urban Futures Lab (UFL) on the 19th floor at 15 MetroTech. The interior design of the lab was AMAZING! There’s unique artwork throughout the space of the lab. We met with Amy Chen (Coordinator of the meeting from the UFL) in the Edison room of the lab, which had a breathtaking view of downtown Brooklyn and Manhattan along with four different NYC bridges! She gave us a description of what the Urban Future Lab is all about along with a tour of the beautiful lab. We talked about the different startup companies that occupied the space and their commitment to reducing carbon emissions. At the end of the tour Amy invited two startups to talk to us about what it is they are doing at the UFL and what the process of starting up their own company was like. We learned a lot! --including how funding from others is great, but you also loose a big chunk of your company every time you accept an investment. It was truly a remarkable experience.
After the UFL visit, we returned to the classroom where we continued our entrepreneurship lessons with Professor Nov. We discussed a series of topics including: evaluating a business, business angels, investment factors, social entrepreneurship, along with others. At the end of the lecture each group had the opportunity to deliver (once again) their pitch for a company they created. With feedback from the previous day we all worked through lunch break to address concerns and holes in our pitches. The final product for most groups was very creative and successful. If I were a rich investor I would definitely invest after the pitches that were made today!