Science and Mechatronics Aided Research for Teachers with an Entrepreneurship Experience (SMARTER)
2015: Week III
Marc Frank and Ramona Fittipaldi
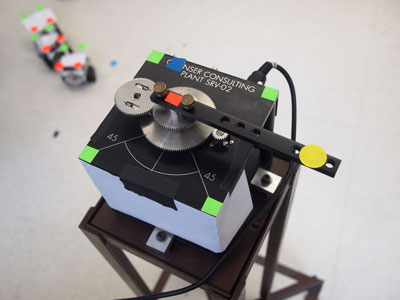
This week we were placed into our groups after two weeks of lectures and lab work. We were assigned to the Applied Dynamics and Optimization Lab with Prof. Kim. We quickly learned what applied dynamics and optimization entail by observing the different artifacts in the lab, e.g., the different circuits, the robot Darwin, and a robotic arm. These artifacts relate to applied dynamics in that they are used to study energy and stability of organisms and robots. The robots allow researchers to better understand the kinematics of motion of these objects in order to optimize energy usage. Prof. Kim assigned us numerous articles to read. The first article, “Dynamics of Human Gait”, discussed the gait cycle, which consists of the stages of human steps. We also received a sheet with gait cycle terminology. We used this sheet to better understand the topic. After reading the gait cycle articles, we read “Energy Expenditure of Biped Walking Robot: Instantaneous and Degree-of-Freedom-Based Instrumentation with Characterization Relative to Human Gait Energetics,” which discusses the energy that it takes for a humanoid to walk and compares it to humans. Another document we read was the robotic arm manual, which taught us how to enter data and about the components of the robotic arm. The next few days, we spent on the computer setting up static tests that allowed us to analyze the robotic elbow and shoulder movement at various angles. To the right is a photo of the robotic arm during one of the static tests.

Lauren Schulman and Brian Palacios
The goal this week was to determine what we were going to do for our research and to compile the resources for it. We decided that for our research, we wanted to develop a new composite material. We considered various materials, including graphene, carbon fibers, human hair, cement, and epoxy resin. After conducting further research in these materials, we finalized our research idea. Our research is aimed at developing a low density, environmentally friendly composite syntactic foam concrete material. We have two goals in mind for the concrete.
- Develop a concrete that is environmentally friendly by incorporating the non-degradable materials, e.g., human hair and fly ash.
- Create a foam composite structure that optimizes durability and strength in the concrete while minimizing the density.
Horace Walcott and Brian Lam
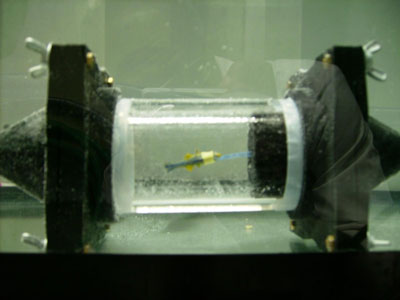
This week we met with Violet Mwaffo and the rest the team of Dr. Maurizio Porfiri’s Dynamical Systems Laboratory. For our experiment we have been planning on contributing to the design of an artificial zebrafish and enclosed flow chamber, oscillating the replica zebrafish tail in a lifelike manner, and observing the behavior of a live zebrafish in the wake of the replica. We plan to monitor water temperature and flow rate, as well as dissolved O2 and CO2 concentrations, in the wake of both the replica and the live fish, and use thermal imaging as well as a wireless electrocardiogram to monitor the biological response of the live fish. At this point in time there are two options for actuating the body and tail of the replica fish, for the generation of carangiform locomotion. Option 1 will utilize a small hole drilled into the top of the swim chamber, with a servo motor attached to a microcontroller outside the chamber rotating a thin shaft inside of a hollow tube, attached to the fish replica. Option 2 involves placing very small rare earth magnets inside the tail of the replica fish and construction of Arduino controlled electromagnets on either side of the swim tank. Both options should enable lifelike carangiform motion in the replica fish. Many resources on zebrafish physiology are available due to the use of zebrafish in genetics studies and developmental biology [1]. In recent years, zebrafish have been used more and more as laboratory animals as opposed to rodents, such as mice, due to their ease of care and ability to generate large numbers of new embryos very quickly. Zebrafish embryos are transparent, but while adults are not, much work has been done with them showing that their behavior and responses to stimuli are easily observable, as described by R. Ma in 2012 [3]. We also found research on optimal propulsion of robotic fish while still maintaining the carangiform model of motion [2]. In order to examine the possibility of controlling the fish replica using magnetic fields, Horace brought a variety of magnets from his school to use with thin plastic beams, representing slender beams. As shown in Figures, the magnets were able to cause bending in the beams at a distance equal to the radius of the swim chamber. Measurements were made of the linear displacement of the beam, angular displacement of the beam, shown in Figures, and magnetic field strength at different distances from the magnets. Magnet wire as well as iron rods will be ordered in order to construct custom electromagnets for Option 2 of the project. Together with Howard Chien, we have made many improvements to the swim chamber of the replica and live zebrafish and have discussed varying methods of preventing leaks and maintaining laminar flow in the tube. As shown in Figures, almost all of the air has been purged from the flow chamber by assembling it underwater, and an example replica has been attached in such a way as to maintain an upright and forward position in the chamber. Different connections and fittings will be modeled in SolidWorks to be 3D printed, or ordered online in order to prevent leaks, facilitate the measurement of water conditions, and more efficiently conduct the experiment.
References:
- C. Binesh, 'Elevation of temperature and crowding trigger acute viral nervous necrosis in zebra fish, Brachydanio rerio (Hamilton-Buchanan), subclinically infected with betanodavirus', J Fish Dis, vol. 37, no. 3, pp. 279-282, 2013.
- J. Yu, S. Wang and M. Tan, 'A simplified propulsive model of bio-mimetic robot fish and its realization', Robotica, vol. 23, no. 1, pp. 101-107, 1999.
- R. Ma, M. Distel, X. Deán-Ben, V. Ntziachristos and D. Razansky, 'Non-invasive whole-body imaging of adult zebrafish with optoacoustic tomography', Physics in Medicine and Biology, vol. 57, no. 22, pp. 7227-7237, 2012.


Hau-yu Chu and Daniella DiLacqua
Our team has begun our research phase to get an overview of current augmented reality (AR) technologies and their use in education. We kept a shared Google document to open lines of communication about the research papers we read. We have discovered that many applications of AR use position-based sensing to call up useful information for a user. This has been demonstrated in a museum setting in China. Other AR projects use marker and markerless applications for education, gaming, and even advertisements. AR can be used to enhance a textbook by bringing up a 3D image. Some studies attempted to quantify the impact of AR vs traditional teaching methods on students. Others were more concerned with acknowledging increased motivation on tech native students. Additionally, we spend some time getting more familiar with hardware and software components that we will need knowledge of as we move forward with our projects. Hau-yu even brought in her personal supply of Littlebits. We spent some time going through Arduino tutorials and noting the differences between the Arduino and Basic Stamp 2 syntax. We compared and contrasted the benefits of codebender, Android Studio, and MIT AppInventor2. Daniella has begun creating basic apps with AppInventor2. We look forward to using this knowledge to help graduate students Jared and Anthony improve their projects.
Phil Cook and Iulian Irimina
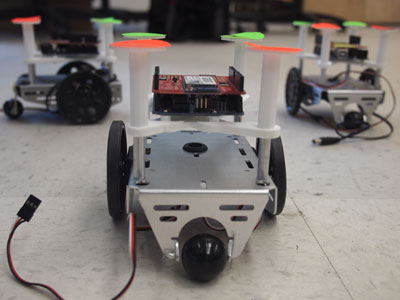
The majority of the time during the third week of the SMARTER RET program was spent reading current research articles on augmented reality. Specifically, we focused on reading research regarding mobile implementation of AR as well as AR implemented within a learning environment. We were able to observe a swarm robot project which uses AR built into a mobile phone app to identify the location and orientation of robots. In addition to spending time reading articles, we also began to work through several basic Arduino projects to become familiar with the programming language, as our schools have several Arduino kits already. Phil had the idea to create a sensor that could interface with the Arduino, and this resulted in background work on conductivity sensors. He was able to write code that displayed the voltage passing through a diy conductivity sensor, and created the prototype circuitry on a breadboard connected to the Arduino Uno provided by NYU Tandon School of Engineering. Julian spent time working with Android Studio, which culminated in the creation of an app that allows the user to remotely control a dc servomotor.
YaQi Xiong and Tchnavia D. Merrick
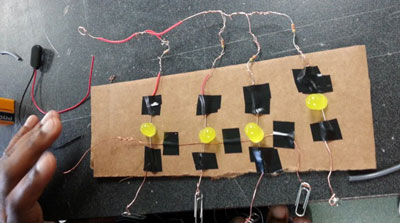
Our research began by exploring our topics of interest. We decided to study capillary action in soil. Our goal is to design a model to help the students to visualize capillary action. Our student-friendly apparatus uses LEDs and sound indicators to measure the water level rise in soil. Our research will involve the following
- Design an LED circuit using battery and salt water.
- Use Arduino to build a sensor system to detect light.
- Create a capillary chamber with LED circuit and sensor.